Elektronika / Kamery i aparaty
Instrukcja obsługi systemu wideo RunCam WiFiLink 2
Szybki przewodnik po instalacji i konfiguracji systemu wideo RunCam WiFiLink 2. Dowiedz się, jak poprawnie zamontować anteny, podłączyć zasilanie, zaktualizować oprogramowanie oraz skonfigurować system do pracy z kontrolerem lotu i stacją...
Spis treści
Obrazy z instrukcji
Kliknij obraz, aby powiększyćNajważniejsze informacje z instrukcji
RunCam WiFiLink 2 to zaawansowany system wideo przeznaczony do montażu na dronach. Instrukcja zawiera kluczowe wytyczne dotyczące bezpiecznego montażu anten, poprawnego podłączenia zasilania oraz konfiguracji oprogramowania. Przed rozpoczęciem użytkowania upewnij się, że zasilanie mieści się w zakresie 9-22V, a anteny są poprawnie rozmieszczone, aby uniknąć zakłóceń sygnału.
Opis urządzenia
System składa się z modułu głównego z wentylatorem chłodzącym, anten oraz kamery z obiektywem M12. Na obudowie znajdują się złącza: 6PIN (zasilanie), port RJ45 oraz złącze zasilania wentylatora. Urządzenie posiada również wbudowane diody LED informujące o statusie pracy.

Instalacja i podłączenie
Podczas montażu na statku powietrznym należy zwrócić uwagę na dwa kluczowe aspekty:


- Układ anten: Dwie anteny ogonowe muszą być w pełni rozłożone, aby uniknąć splątania i zredukować zakłócenia sygnału.
- Orientacja anten: Anteny powinny być skierowane w górę, aby uniknąć przeszkód ze strony kadłuba lub akumulatora, co zapewnia optymalną wydajność sygnału.
- Podłączenie zasilania: Kabel zasilający 6PIN należy podłączyć do interfejsu DJI 6PIN w kontrolerze lotu.
Wskaźniki LED
Diody LED informują o aktualnym stanie systemu:

- Zielona dioda: Wyłączona (audio wyłączone), stałe światło (audio włączone), szybkie miganie (aktualizacja firmware), wolne miganie (nagrywanie włączone).
- Niebieska dioda: Stałe światło (uruchamianie), szybkie miganie (błąd WiFi).
- Naprzemienne miganie niebieskiej i zielonej: Ostrzeżenie o wysokiej temperaturze (>90°C).
Konfiguracja i obsługa
Aby skonfigurować system, należy zainstalować aplikację PixelPilot (dla urządzeń mobilnych) lub użyć oprogramowania fpv4win na komputerze PC. Wymagana jest konfiguracja kanału (zalecane 161) oraz kodeka wideo (h265). Aktualizacja oprogramowania odbywa się poprzez umieszczenie plików .bin na karcie SD i włączenie zasilania kamery.
Rozwiązywanie problemów
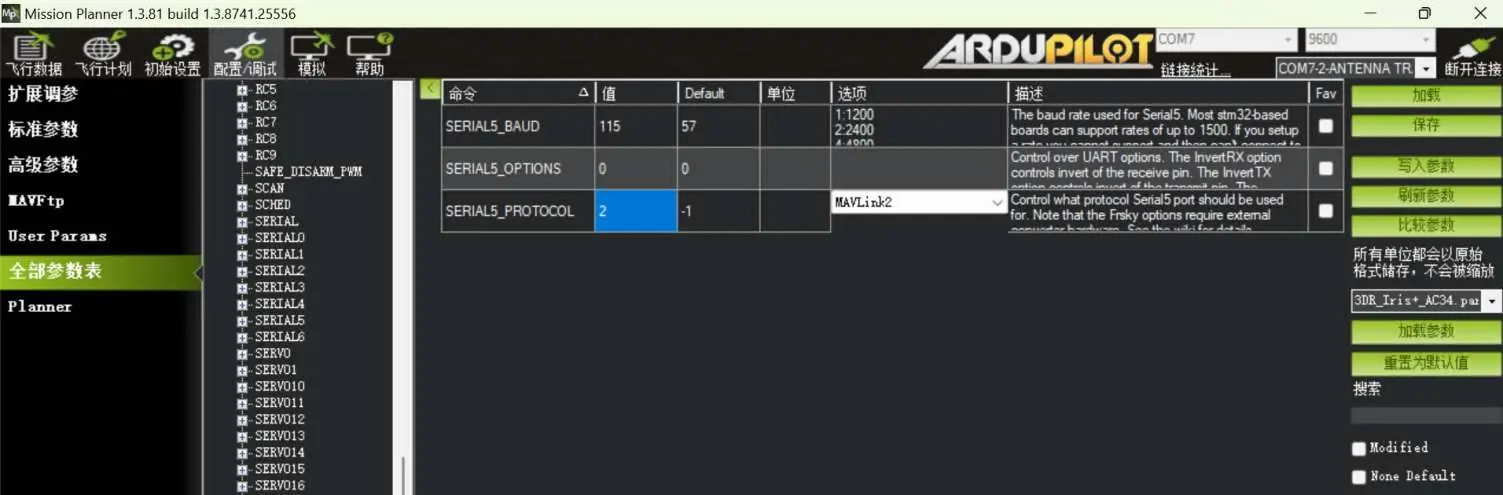
W przypadku braku obrazu sprawdź, czy zasilanie jest prawidłowe oraz czy ustawienia kanału i kodeka są zgodne z odbiornikiem. Jeśli brakuje informacji OSD z kontrolera lotu, zweryfikuj konfigurację parametrów (115200, Mavlink1/2) oraz upewnij się, że przewody TX i RX są poprawnie skrzyżowane.
Dane techniczne
System obsługuje rozdzielczości do 1080P przy 90FPS. Waga urządzenia wynosi 30g z wentylatorem lub 25g bez niego. Zasilanie: 9-22V (maks. 15W). Sensor: IMX415, FOV: 160°.
Praktyczna pomoc
Typowe problemy
Brak obrazu
Sprawdź, czy zasilanie jest prawidłowe (9-22V) oraz czy ustawienia kanału i kodeka w aplikacji są zgodne z odbiornikiem.
Brak informacji OSD z kontrolera lotu
Sprawdź konfigurację parametrów (115200, Mavlink1/2) oraz upewnij się, że przewody TX i RX są poprawnie skrzyżowane.
Ostrzeżenie o wysokiej temperaturze
System przekroczył 90°C. Sprawdź działanie wentylatora i zapewnij odpowiedni przepływ powietrza.
Przed użyciem
- Upewnij się, że anteny są skierowane w górę i rozłożone.
- Sprawdź, czy zasilanie mieści się w zakresie 9-22V.
- Przygotuj pustą kartę SD do aktualizacji oprogramowania.
- Zainstaluj aplikację PixelPilot lub oprogramowanie fpv4win na PC.
- Zweryfikuj poprawność połączenia kabla 6PIN z kontrolerem lotu.
Ilustracje i schematy
- Schemat anten pokazuje optymalne rozłożenie dla uniknięcia zakłóceń.
- Schemat 6PIN pokazuje poprawne podłączenie do kontrolera lotu.
Zgodność modelu
- Wymaga kontrolera lotu z interfejsem DJI 6PIN.
- Kompatybilny z Radxa ZERO 3W.

Autor opracowania
Anna Kowalska
Redaktorka treści użytkowych
Tworzy krótkie opisy instrukcji i porządkuje informacje techniczne tak, aby były zrozumiałe dla osób szukających manuala online.